

COSMIC Competition
(Consortium for Space Mobility and ISAM Capabilities)
Statement of Intent
Astrobotics is developing a fully autonomous software platform that enables robotic systems to identify, align, join, and verify structural components in orbit using precision riveting. The platform combines AI-driven perception, motion planning, and process control in a unified autonomy stack. This allows robots to execute high-precision assembly tasks with minimal human intervention, adapt to different end-effectors and platforms, and generate verifiable, repeatable joints at orbital worksites. The software platform is highly adaptable and interoperable across different robotic systems, supporting a wide variety of ISAM missions.
This effort directly supports COSMIC’s objective of advancing on-orbit assembly and manufacturing: it turns structural joining, a core bottleneck in scalable space construction, into a software-defined, inspectable, and automatable process suitable for multi-mission use.

Charter Project
Introduction
As an introductory project to establish core competencies in robotic arm design and fabrication, a 3-degree-of-freedom (DOF) robotic arm was developed. The design intent of the arm was to attach to and deorbit space debris.
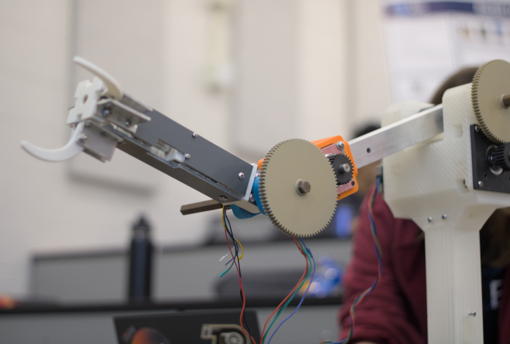


Structures
The Structures focused on the design of the arm mechanism, which featured a claw, wrist, elbow, and shoulder part. The wrist and elbow were joints that enables the arm mechanism to extend and contract. The shoulder enabled a 360-degree rotational motion from the base. Lastly, the claw enabled attachment to approximately tennis ball sized space debris.
Electronics
The charter project established the Electronics Team’s baseline architecture for power, sensing, and controls and refined their approach to wiring, testing, and subsystem integration.
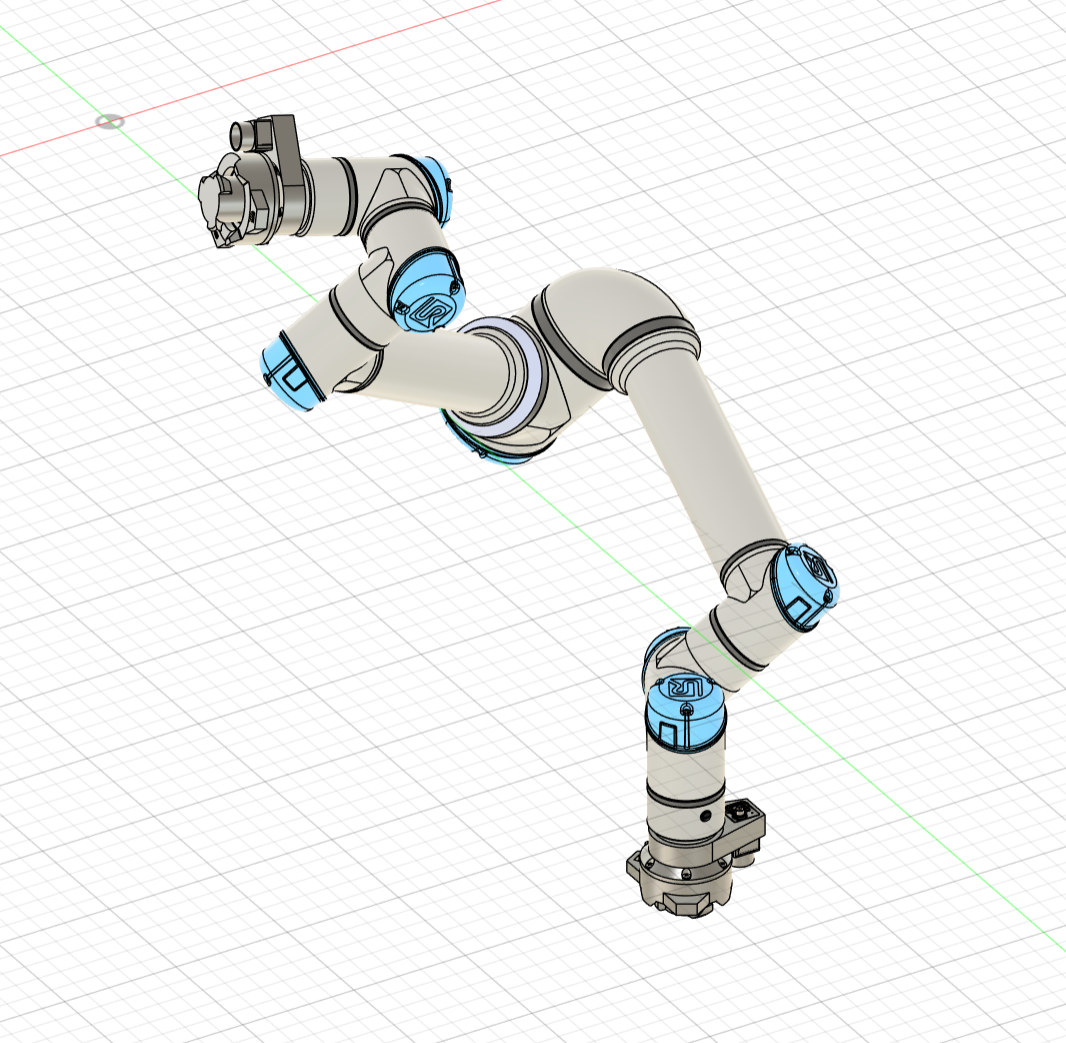
Simulations
The simulations team used the charter project to learn ROS and Gazebo, critical software packages to robotic arm development and operation, and ultimately created a URDF and launch file for the arm.
