The Ground Systems team was a later addition to the PSP Hybrids project, and was created in order to better meet the evolving needs of what was originally the Fluid Systems team. The Fluid Systems team was created to design the oxidizer tank as well as the plumbing that was onboard the HAVOC vehicle, which ensured nitrous oxide could be successfully stored and delivered to the engine. Now that this design is finalized, the new Ground Systems team has been focusing on creating the hardware that is necessary to prepare the vehicle for flight on launch day. Although the Ground Systems team has little impact on the design of HAVOC itself, we are still proud to be a critically important part of making sure the rocket can fly.
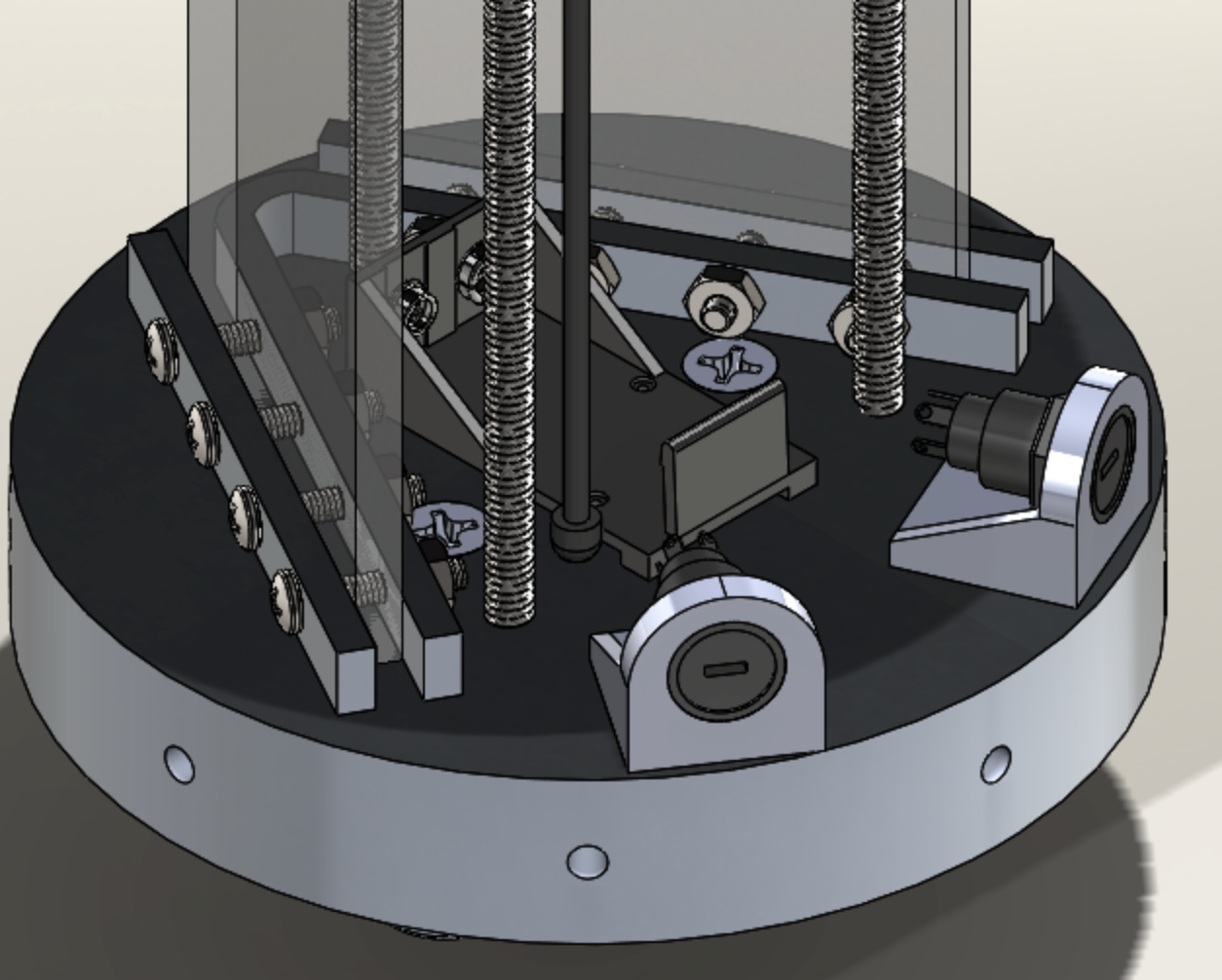
The goal of the Ground Systems team is to build a fully integrated launch pad assembly that can load liquid nitrous oxide into the vehicle without any direct human contact. Members of the team will be able monitor and control the filling process from a safe distance without ever approaching the vehicle, which ensures that no member of the team is ever at risk of injury. Since we will be launching from a remote location, our ground infrastructure must also be rugged, self-contained, and able to provide its own power and communications systems.
Our control system will also be capable of collecting pressure and temperature data from the flight tank and combustion chamber, thus will be used to acquire performance data during static hotfire testing.